-
-

- ▲ (왼쪽) 실내 모니터링 로봇 티램, (중앙) 사고대응 로봇 암스트롱 / 한국원자력연구원 제공
체르노빌, 후쿠시마 원전 사고 당시 작업자가 사고 현장에 직접 투입되면서 2차 피폭자가 발생했을 뿐만 아니라 작업 진행이 느려 더 큰 피해를 낳았다. 이후 독일, 프랑스, 러시아, 일본 등 원자력 선진국들을 중심으로 로봇을 이용한 방재 조직이 생겼다. 이제 우리나라에서도 로봇 방재 시대가 한걸음 가까워진다.
7일, 한국원자력연구원에 따르면 자체 개발한 원자력 로봇들로 원자력 사고에 대응하는 자체 무인 방재 시스템을 갖췄다고 밝혔다.
-
-
-
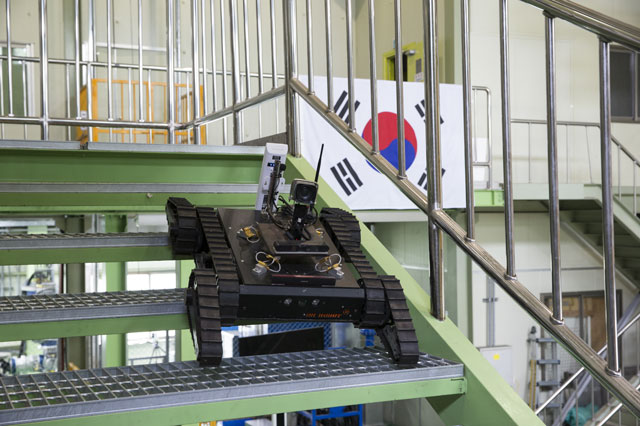
- ▲ 실내 모니터링 로봇 티램이 계단을 올라가며 360도 현장 상황을 촬영하고 있다 / 한국원자력연구원 제공
후쿠시마 원전 사고 이후 2015년부터 방재용 로봇 개발과 로봇 방재 시스템 구축에 꾸준히 힘써온 한국원자력연구원은 실내 모니터링 로봇 '티램(TRAM, Tracked Radiation Area Monitoring)', 실외 모니터링 로봇 '램(RAM, Remote control system for Accident Monitoring)', 사고대응 로봇 '암스트롱(ARMstrong, Accident Response Manipulator)', 공중 방사선 모니터링 드론으로 최근 실제 방재훈련에 참여, 실효성을 입증했다.
먼저 티램은 방사선, 온도 탐지기를 탑재하고 계단과 장애물을 넘으며 이동한다. 본체 높이가 30cm에 불과한 소형 장갑차 형태의 로봇으로, 사고 현장의 방사선량, 열화상 정보와 3차원 지도를 실시간으로 작성, 외부로 송신할 수 있다.
램은 상용 ATV를 원격 조종하는 방식으로, 넓은 발전소 부지 안에서 방사선 탐지 장비 등을 싣고 시속 60km 속도로 고속 주행할 수 있다. 램에 공중 모니터링을 위한 드론을 조합해 지상과 공중 다각도에서 현장 관측과 방사선 오염지도 작성이 가능하다.
암스트롱은 유압시스템을 적용해 양팔로 총 200kg 하중의 물건을 자유롭게 움직이고 무한궤도로 험지 이동이 가능하다. 무거운 콘크리트나 폐기물 드럼을 취급하고 소화수를 분사하거나 잔해물 처리, 밸브 조작이 필요한 사고 현장에서 특히 유용하다. 사람 팔 모양의 마스터 디바이스를 움직이면 암스트롱의 팔도 함께 똑같이 움직이는 방식으로, 고중량 파이프를 조립할 수 있음은 물론 랜 커넥터를 꽂는 섬세한 작업까지 가능하다.
-
-
-

- ▲ 암스트롱 로봇이 누출 차단막을 설치하고 있다 / 한국원자력연구원 제공
한국원자력연구원은 방사선 비상 대책의 실효성을 검증하기 위해 매년 2회 이상 다양한 시나리오의 방사능 방재훈련을 실시하고 있다. 2016년부터 6차례에 걸쳐 실제 훈련에 로봇을 투입하며 실효성을 검증하고 로봇을 보완해왔다.
지난 8월, 10월 훈련에서는 티램이 건물 내부로 진입해 현장 상황을 상황실로 전송하고, 암스트롱이 우레탄 폼을 분사해 방사성 물질이 누출되는 건물의 출입구를 밀봉하는 작업을 성공적으로 완수했다. 암스트롱의 방사성 물질 밀봉 훈련은 해외에서도 시도해 본 적 없는 것으로, 우수한 기술력을 확인하는 계기가 됐다.
그동안의 수 차례 훈련으로 기능이 안정화됐을 뿐만 아니라, 올해 훈련에서는 로봇 전용 영상통신 서버를 구축해 보안을 크게 강화했다. 무선통신으로 제어하고 데이터를 송수신하는 로봇의 특성상 사이버 보안은 특히 중요한 문제이다.
정경민 로봇응용연구부장은 "연구원 자체 로봇 방재시스템 구축은 1단계 시작에 불과하다"며, "지속적인 보완을 통해 만일의 사고에도 국민들이 안심할 수 있는 만반의 태세를 갖추도록 노력하겠다"고 밝혔다.
-
- 성열휘 기자 sung12@chosun.com